HC-SR04 Ultrasonic Distance Sensor
Written by Luka Kerr on March 9, 2018
This post explains how to use the HC-SR04 ultrasonic sensor with your Arduino board. You first must download the NewPing library. After this go to the Arduino IDE and select Sketch –> Include Library –> Add .ZIP Library and select the NewPing library just downloaded.
Now include the NewPing header file.
#include <NewPing.h>
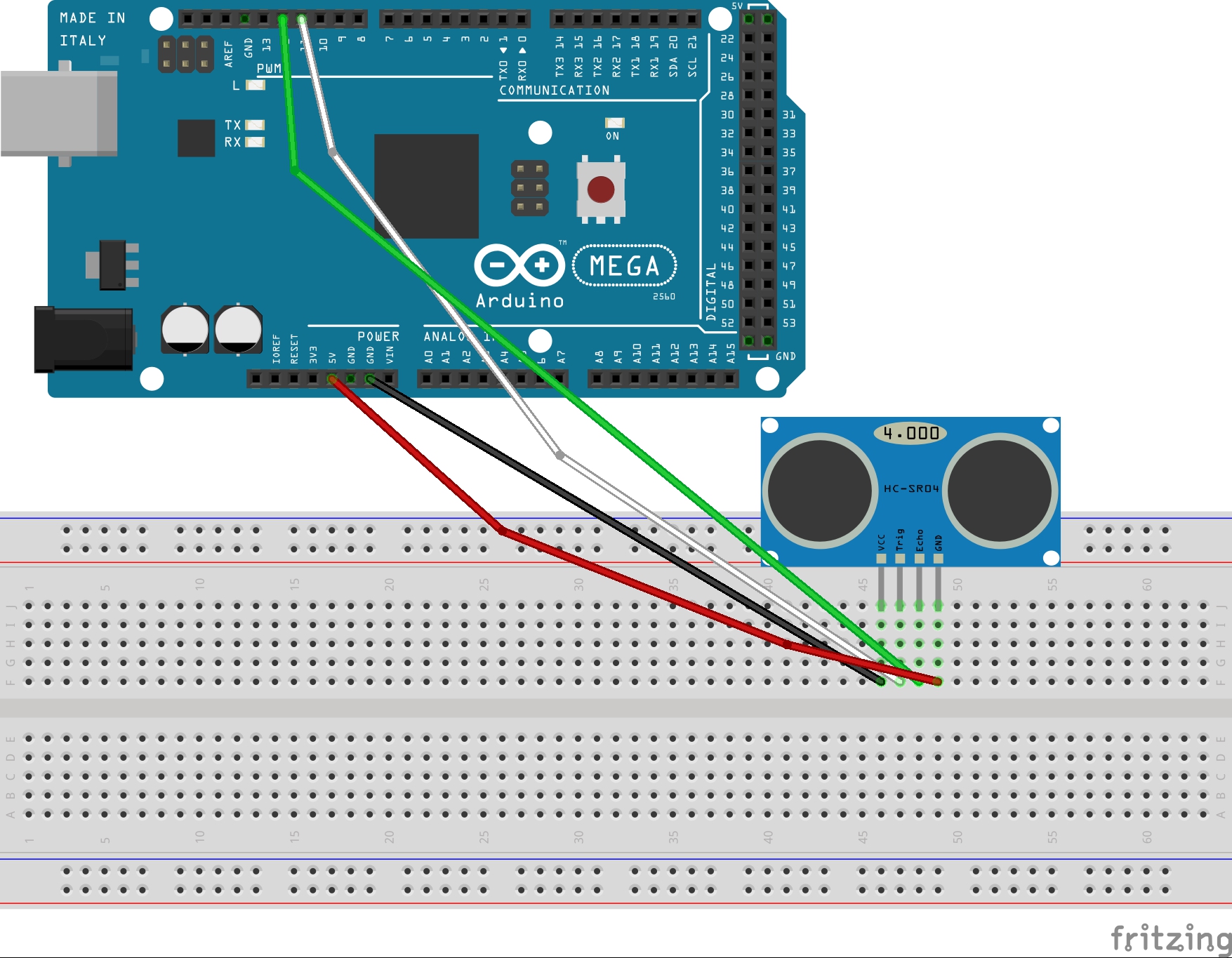
Next you have to define three constants, these are explained in the comments. The pins used (12, 11) are shown in the Fritzing diagram at the bottom of the page.
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
Next you use the NewPing library to setup these constants.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
Next is the setup() function which reads the input stream and outputs it to the serial monitor. To access this, go to the Arduino IDE, select Tools –> Serial Monitor and make sure it is set at 115200 baud.
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
}
Finally the loop() function is executed every 50ms. This sends a ping and gets its distance in cm away from an object.
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
Serial.print("Ping: ");
Serial.print(sonar.ping_cm()); // Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println("cm");
}
In the end this is what your Arduino sketch should look similar to:
#include <NewPing.h>
#define TRIGGER_PIN 12 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN 11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
void setup() {
Serial.begin(115200); // Open serial monitor at 115200 baud to see ping results.
}
void loop() {
delay(50); // Wait 50ms between pings (about 20 pings/sec). 29ms should be the shortest delay between pings.
Serial.print("Ping: ");
Serial.print(sonar.ping_cm()); // Send ping, get distance in cm and print result (0 = outside set distance range)
Serial.println("cm");
}
Fritzing Diagram
The wiring for the sensor is shown below: